

ABSTRACT
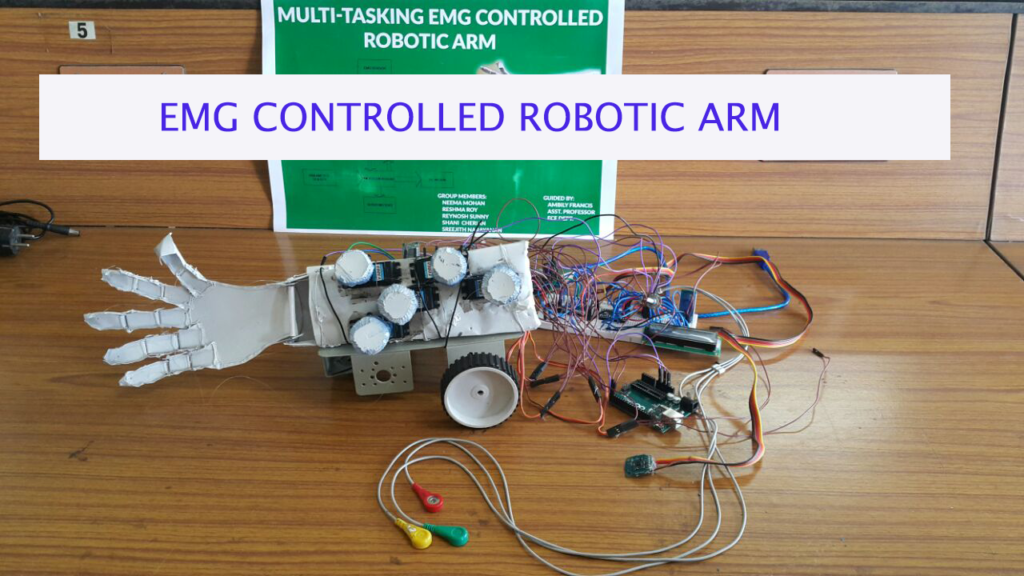
Robotic arms are widely used for industrial robotics and automation. The robotic arm exactly mimic the motions of the human arm. Human-robot controlled interfaces provides services to people with special needs such as elderly, people with impairments or people with disabilities. This project aims at developing a movable robotic arm that is controlled by the EMG signals taken from the muscles of the upper limb. Using these EMG signals, the interface between user and the robotic arm can be controlled. The system consists of arm control part and an accelerometer controlled car that bears the arm. The operator can control the arm motions using the arm control part. The microcontroller is used to generate signals to control the mechanical arm based on the EMG input signals. The accelerometer controlled car is used for the movement of the arm so that the arm can pick up and manipulate objects at a distance. The arm motions of the operator can be estimated with a high degree of accuracy using the EMG signals and the manipulator can be controlled smoothly. Parametric sensors like temperature and gaseous sensors are additionally added to the circuit. An LCD display is also added so as to display the recorded values from the temperature and gaseous sensors. The arm can be used for multiple tasks such as bomb diffusion, aid for needy people, surgical purposes etc.The presented work is based on the faithful extraction of EMG signals from human body. The EMG signal acquired is maintained under the range of 0 to 5 volts and can be accessible by any ADC unit. The digital data obtained after conversion is utilized to read by microcontroller unit. The data received from the microcontroller port is further tested on various class of motors like stepper motors, servo motors and DC motors resulting in a mechanical model which is designed to organize the robotic arms versatility with respect to number of position and rotation in various applications. The threshold selection is a careful task and depends upon the end application. The thresholds given above are general one and may not suit to every application. But a model may be developed for any particular application like typing, lifting parts or any repetitive tasks. The scope of the design can further be advanced in the area of arm prosthesis, rehabilitation engineering, diagnosis in the medical and sports science.


The use of bio-signals is of very high significance in human computer interaction or human machine interaction. EMG itself has a wide range of possible applications. The possible projects that can be extended from our project are given below: • Hand-written character recognition - Hand-written characters can be recognized using EMG signals obtained from the forearm of the writer.