
FACE SPOOFING DETECTION
INTRODUCTION
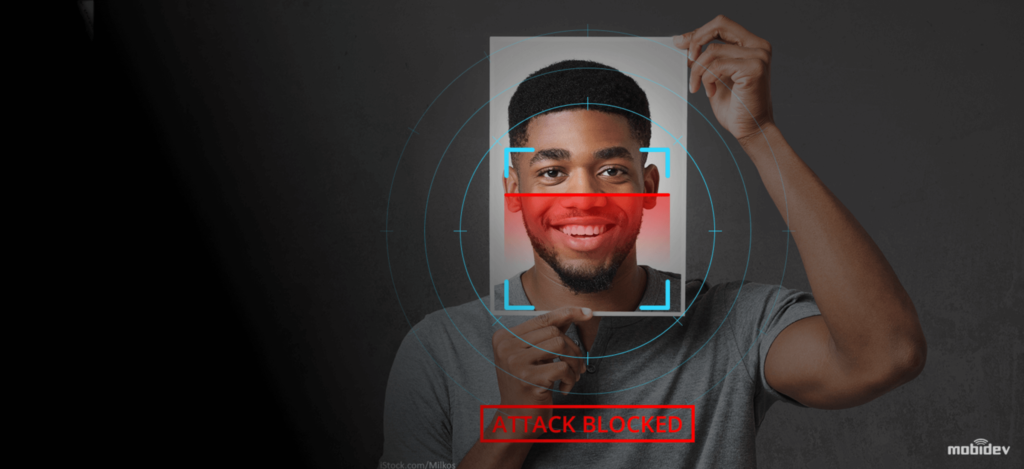
Nowadays, it is known that most of the existing face recognition systems are vulnerable
to spoofing attacks. A spoofing attack occurs when someone tries to bypass a face
biometric system by presenting a fake face in front of the camera. Here we use
Image quality assessment method for detecting face spoofing.
BACKGROUND
In recent years, the increasing interest in the evaluation of biometric systems
security has led to the creation of numerous and very diverse initiatives focused on
this major field of research the publication of many research works disclosing and
evaluating different biometric vulnerabilities the proposal of new protection
methods related book chapters the publication of several standards in the area the
dedication of specific tracks, sessions, and workshops in biometric-specific and
general signal processing conferences the organization of competitions focused on
vulnerability assessment the acquisition of specific datasets the creation of groups
and laboratories specialized in the evaluation of biometric security or the existence
of several European Projects with the biometric security topic as the main research
interest. All these initiatives clearly highlight the importance given by all parties
involved in the development of biometrics (i.e., researchers, developers and
industry) to the improvement of the security of the system to bring this rapidly emerging
technology into practical use.
OBJECTIVES
In the present work we propose a novel software-based multi-biometric and multi-
attack protection method which targets to overcome part of these limitations
through the use of image quality assessment (IQA). It is not only capable of operating with very good performance under different biometric systems (multi-
biometric) and for diverse spoofing scenarios, but it also provides a very good level
of protection against certain non-spoofing attacks (multi-attack). Moreover, being
software-based, it presents the usual advantages of this type of approaches: fast, as
it only needs one image (i.e., the same sample acquired for biometric recognition)
to detect whether it is real or fake; non-intrusive; user-friendly (transparent to the
user); cheap and easy to embed in already functional systems (as no new piece of
hardware is required). An added advantage of the proposed technique is its speed
and very low complexity, which makes it very well suited to operate in real
scenarios (one of the desired characteristics of this type of method). As it does not
deploy any trait-specific property (e.g., minutiae points, iris position, or face
detection), the computation load needed for image processing purposes is very
reduced, using only general image quality measures fast to compute, combined with
very simple classifiers.
SYSTEM ANALYSIS
There are many existing systems used to face spoofing detection. But they have
some limitations. This section includes a detailed study of the existing systems,
Literature survey. Also given brief details about the proposed system.
2.1 EXISTING SYSTEM
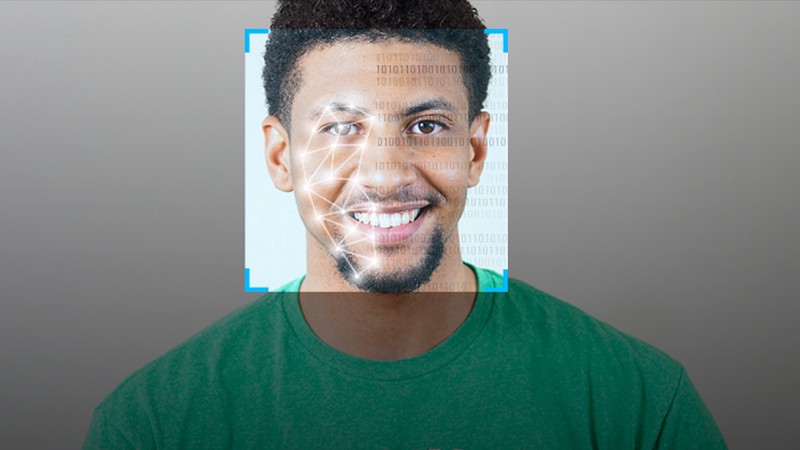
Despite a lot of advancements in face recognition systems, face
spoofing still poses a serious threat. Most of the existing academic and commercial
facial recognition systems may be spoofed (i) a photo of a genuine user; (ii) a video
of a genuine user; (iii) a 3D face model (mask) of a genuine user; (iv) a reverse-
engineered face image from the template of a genuine user; (v) a sketch of a genuine
user; (vi) an impostor wearing specific make-up to look like a genuine user; (vii) an
an impostor who underwent plastic surgery to look like a genuine user. The most
The easiest, cheapest, and common face spoofing attack is to submit a photograph of a
legitimate user to the face recognition systems, which is also known as “photo
attack.”
Typical countermeasure techniques can be coarsely classified into three
categories based on clues used for spoof attack detection: (i) motion analysis based
methods, (ii) texture analysis based methods, and (iii) hardware-based methods. In
what follows, we provide a brief literature overview of published face spoof
recognition techniques along with their pros and cons.
(i) Motion Analysis Based Methods. These methods broadly try to detect
spontaneous movement clues generated when two-dimensional counterfeits are
presented to the camera of the system, such as photographs or videos. Therefore,
exploited the fact that human eye-blink occurs once every 2–4 seconds and
proposed eye-blink based liveness detection for photo-spoofing using eye-
blinks. This method uses an undirected conditional random field framework to model the eye-blinking, which relaxes the independence assumption of generative
modeling and states dependence limitations from hidden Markov modeling. It is
evident that real human faces will move significantly differently from planer
objects, and such deformation patterns can be employed for liveness detection. For
example, considered Lambertian reflectance model with difference-of-Gaussians
(DoG) to derive differences of motion deformation patterns between 2D face photos
presented during spoofing attacks and 3D live faces. It does so by extracting the
features in both scenarios using a variational retinex-based method and difference-
of-Gaussians based approach. Then, the features are used for live or spoof
classification. Reported experiments showed promising results on a dataset
consisting of real accesses and spoofing attacks to 15 clients using photo-quality
and laser-quality prints. Kollreider proposed a liveness detection approach based on
a short sequence of images using a binary detector, which captures and tracts the
subtle movements of different selected facial parts using a simplified optical flow
analysis followed by a heuristic classifier. The same authors also presented a
method to combine scores from different expert systems, which concurrently
observe the 3D face motion approach introduced in the former work as liveness
attributes like eye-blinks or mouth movements. In a similar fashion, also used
optical flow to estimate motion for detecting attacks produced with planar media
such as prints or screens. Since the frequency of facial motion is restricted by the
human physiological rhythm, thus motion-based methods take a relatively long time
to accumulate stable vitality features for face spoof detection. Moreover, they may
be circumvented or confused by other motions, for example, background motion in
the video attacks.
(ii) Texture Analysis Based Methods. This kind of method examines the
skin properties, such as skin texture and skin reflectance, under the assumption that
surface properties of real faces and prints, for example, pigments, are different.
Examples of detectable texture patterns due to artifacts are printing failures or
blurring. We described a method for print-attack face spoofing by exploiting
differences in the 2D Fourier spectra of live and spoof images. The method assumes
that photographs are normally smaller in size and contain fewer high-frequency components compared to real faces. The method only works well for downsampled
photos of the attacked identity but likely fails for higher-quality samples. They
developed microtexture analysis based methods to detect printed photo attacks. One
limitation of the presented methods is the requirement of a reasonably sharp input image.
(iii) Hardware-Based Methods. Few interesting hardware-based face
antispoofing techniques have been proposed so far based on imaging technology
outside the visual spectrum, such as 3D depth, complimentary infrared (CIR), or
near-infrared (NIR) images by comparing the reflectance information of real faces
and spoof materials using a specific set-up of LEDs and photodiodes at two different
wavelengths. Preliminary efforts on thermal imaging for face liveness detection
have also been exploited, including the acquisition of a large database of thermal face
images for real and spoofed access attempts. Besides, a number of researchers have
explored multimodality as antispoofing techniques for face spoofing attacks. They
have mainly considered the combination of face and voice by utilizing the
correlation between the lips movement and the speech being produced, where a
microphone and a speech analyzer were required. Similarly, challenge-response
strategy considering voluntary eye-blinking and mouth movement following a
request from the system has been studied. Though hardware-based methods
provide better results and performances, they require an extra piece of hardware which
increases the cost of the system
OVERALL ALGORITHM
Step 1: Start
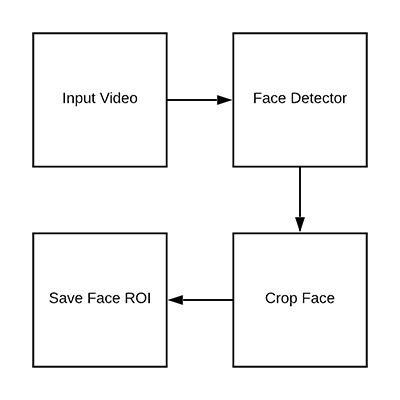
Step 2 : Images are collected using a high-resolution camera
Step 3 : Gives label to each image as spoofed and original
Step 4 : Training dataset is created using collected images
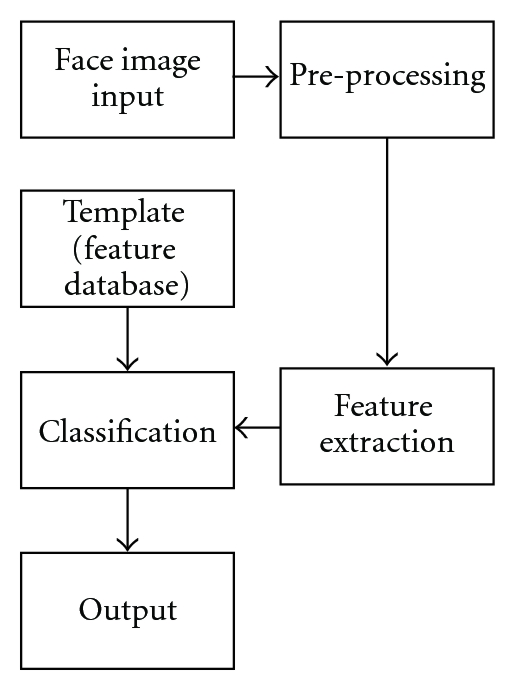
Step 5 : All the images are given to preprocessing
Step 6 : Some features are extracted from each image
Step 7 : A machine learning model is created
Step 8 : New data is given to the model for testing
Step 9 : Repeat step 5 & 6 for new data
Step 10 : Using SVM classifies the new data as spoofed or original
SOURCE CODE
This project includes training, testing, and classification using SVM. Source code
for these are provided here.
6.1 FEATURE EXTRACTION
void training()
{
DatabaseReader dr;
dr.readTrainingFiles();
std::vector labels= dr.getTrainLabels();
std::vectortrainingFileNames = dr.getTrainFileNames();
Mat inputImage,greyImage,blurImage;
Mat training data;
Mat trainingLabels;
cout << “size =” << trainingFileNames.size()<featureVector;
double
MSE,PSNR,SNR,SC,MD,AD,NAE,RAMD,LMSE,NXC,MAS,MAMS,TED,TCD
,SME,SPE,GME,GPE,HLFI;
double
sum=0,ifference=0,sumOfSquresG=0,sumOfSquresB=0,absDiffrence=0,sumForA
D=0,sumForNAE=0,sumForG=0,sumOfProductsNXC=0,sumForTED=0;
double
angle=0,sumForMAC=0,sumForMAMS=0,PI=3.14159265,sumForRAMD=0;
int ROW,COL,greyIntensity,blurIntensity,min=0,maxValue=0;
int temp=0;
vector diffrenceVector,absDiffrenceVector;
int intense1,intense2,intense3,intense4;
double sumForLMSE=0,sumForLMSEG=0,differenceLMSE;
Mat edgeGrey,edgeBlur;
int edgeGintensity,edgeBintensity;
ROW=blurImage.rows;
COL=blurImage.cols;
Mat
Ghij(ROW,COL,CV_8UC1,Scalar(0)),Bhij(ROW,COL,CV_8UC1,Scalar(0));
//Feature calculations
//1.Mean Squre Error
for(int row=0;row(row,col);
blurIntensity=blurImage.at(row,col);
// 1.MSE
ifference=(greyIntensity-blurIntensity);
diffrenceVector.push_back(ifference);
sum=sum+(ifferenceifference); DEPARTMENT OF COMPUTER SCIENCE 24 THEJUS ENGINEERING COLLEGE FACE SPOOFING DETECTION PROJECT REPORT 2018-19 // 3.SNR sumOfSquresG=sumOfSquresG+(greyIntensitygreyIntensity);
// 4.SC
sumOfSquresB=sumOfSquresB+(blurIntensityblurIntensity); // 7.NAE absDiffrence=abs(greyIntensity-blurIntensity); absDiffrenceVector.push_back(absDiffrence); sumForNAE=sumForNAE+absDiffrence; sumForG=sumForG+greyIntensity; //10.NXC sumOfProductsNXC=sumOfProductsNXC+(greyIntensityblurIntensity);
//11,12 MAS.MAMS
double
intermediate=(acos((greyIntensity+blurIntensity)/(greyIntensityblurIntensity))); angle=((2/PI)intermediate);
sumForMAC=sumForMAC+angle;
sumForMAMS=(1-(abs(1-angle)(1-(abs(greyIntensity- blurIntensity)/255)))); } } MSE=(sum/(COLROW));
PSNR=(10.0log((255255)/MSE));
SNR=10.0log(sumOfSquresG/(ROWCOLMSE)); SC=sumOfSquresG/sumOfSquresB; for(int index=0;indexmaxValue) { maxValue=min; } } MD=maxValue; for(int index=0;indexCOL);
NAE=sumForNAE/sumForG;
for(int index=0;index< absDiffrenceVector.size();index++) { for(int index2=index+1;index2(row-1,col);
intense2=greyImage.at(row+1,col);
intense3=greyImage.at(row,col+1);
intense4=greyImage.at(row,col+1);
Ghij.at(row,col)=intense1+intense2+intense3+intense4;
sumForLMSEG=sumForLMSEG+(Ghij.at(row,col)Ghij.at(row, col)); //for Bhij intense1=blurImage.at(row-1,col); intense2=blurImage.at(row+1,col); intense3=blurImage.at(row,col+1); intense4=blurImage.at(row,col+1); Bhij.at(row,col)=intense1+intense2+intense3+intense4; differenceLMSE=(Ghij.at(row,col)-Bhij.at(row,col)); sumForLMSE=sumForLMSE+(differenceLMSEdifferenceLMSE);
}
}
LMSE=sumForLMSE/sumForLMSEG;
NXC=sumOfProductsNXC/sumOfSquresG;
MAS=1-((sumForMAC/ROWCOL)); MAMS=(1/(ROWCOL))sumForMAMS; Sobel(greyImage,edgeGrey,-1,1,1,3); Sobel(blurImage,edgeBlur,-1,1,1,3); for(int row=0;row(row,col); edgeBintensity=edgeBlur.at(row,col); sumForTED=sumForTED+abs(edgeGintensity-edgeBintensity); } } TED=((1/(ROWCOL))*sumForTED);
DFT calculate;
Mat mFg,mFb,aFg,aFb;
calculate.fourierTransform(greyImage,mFg,aFg);
calculate.fourierTransform(blurImage,mFb,aFb);
featureVector.push_back(MSE);
featureVector.push_back(PSNR);
featureVector.push_back(SNR);
featureVector.push_back(SC);
featureVector.push_back(MD);
featureVector.push_back(AD);
featureVector.push_back(NAE);
featureVector.push_back(RAMD);
featureVector.push_back(LMSE);
featureVector.push_back(NXC);
featureVector.push_back(MAS);
featureVector.push_back(TED);
cout<<”MSE=”<<MSE<<endl;
cout<<”PSNR=”<<PSNR<<endl;
cout<<”SNR=”<<SNR<<endl;
cout<<”SC=”<<SC<<endl;
cout<<”MD=”<<MD<<endl;
cout<<”AD=”<<AD<<endl;
cout<<”NAE=”<<NAE<<endl;
cout<<”RAMD=”<<RAMD<<endl;
cout<<”LMSE=”<<LMSE<<endl;
cout<<”NXC=”<<NXC<<endl;
cout<<”MAS=”<<MAS<<endl;
cout<<”TED=”<<TED<<endl;
Mat vec = Mat(featureVector);
vec=vec.reshape(0,1);
trainingData.push_back(vec);
trainingLabels.push_back(labels[index]);
}
SupportVectorMachine svm;
svm.training(trainingData ,trainingLabels);;
}
ADVANTAGES
➢ Good Performance
➢ More Secure
➢ Fast
➢ User-friendly
➢ Cheap and easy
➢ Low complexity
DISADVANTAGES
➢ Different light setting affect the spoofing detection
➢ Quality of camera also affects the accuracy of result

